Research
Theme: Human/robot motion recognition and generation
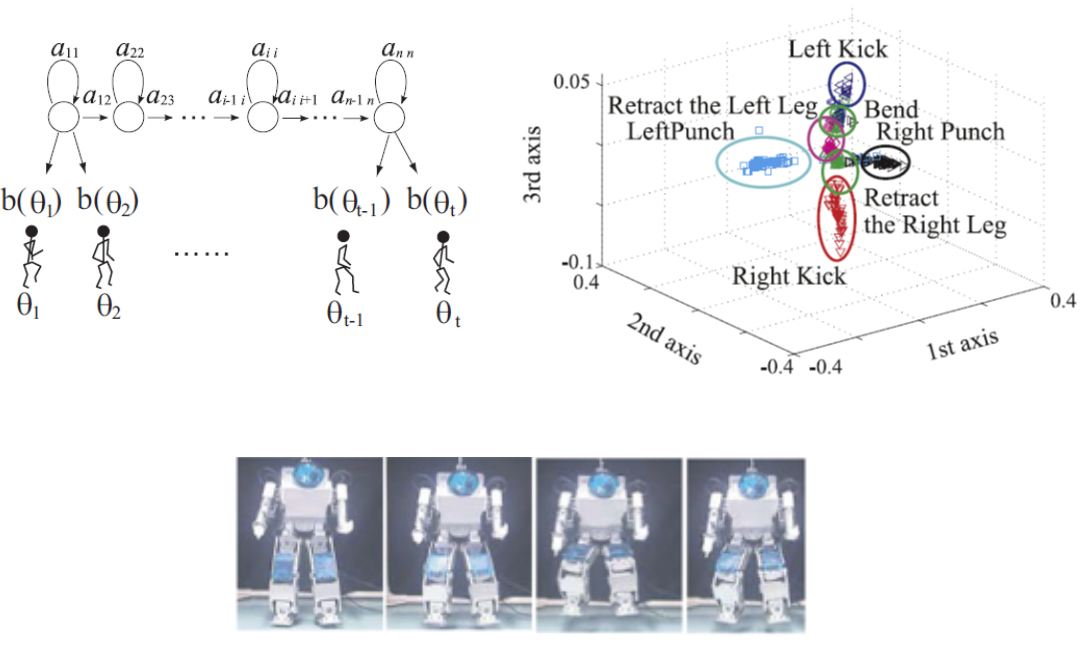
Human motion is segmented into chunks of motion pattern each of which is encoded into a stochastic model, which is referred to as a motion symbol. The stochastic model makes it poosible to recognize an observation of human motion as the motion symbol, and to generate human-like motion for a humanoid robot.
Theme: Modeling of human whole body motion with hands
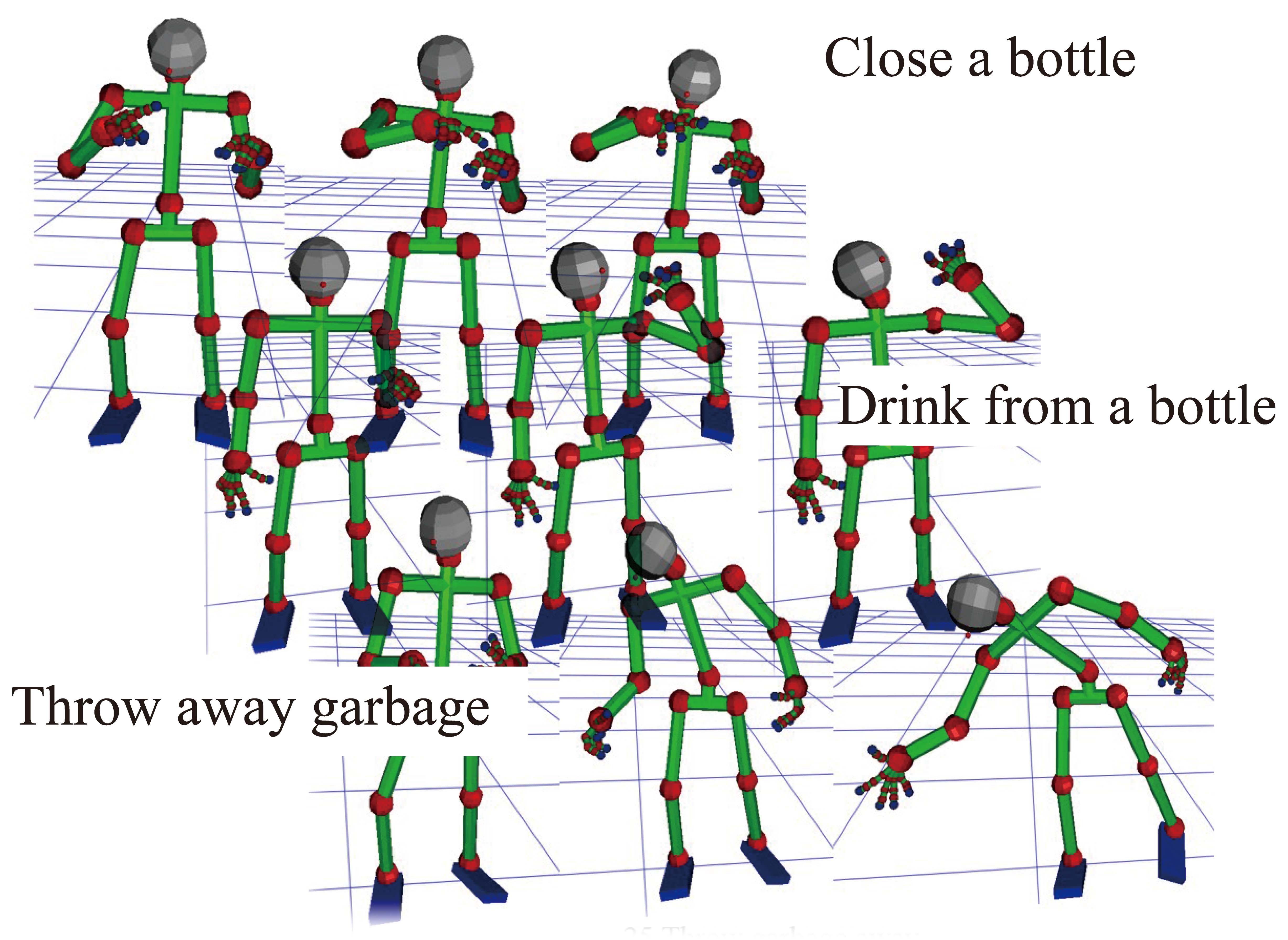
A Hand motion is measured by a data glove with strain gauges attached to fingers. Feature vectors whose entries are the finger motion and whole body motion is subsequently encoded into a stochastic model. This enables a humanoid robot not only to classify human motions but also synthesize maniputation motion with high dexterity.
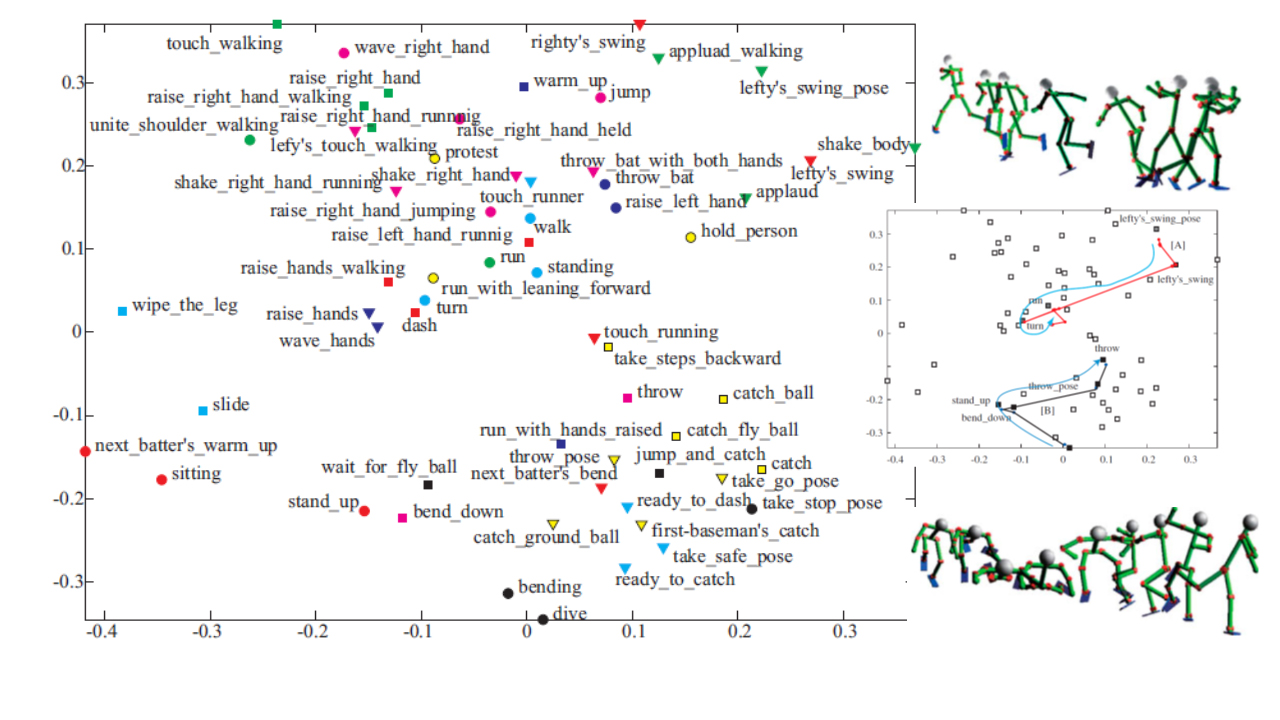
Theme: Networking human activities

Theme: Linking motions to their descriptive labels
Human motion is converted into its relevant motion symbol as which a robot recognize the observation. This motion is also converted into the label which is manually attached to the motion. The mapping between the motion symbols and the labels is found in a stochastic translation manner.
Theme: Integrating motions with natural language
The mapping between the motion symbols and labels(words) is extended to handling descriptive sentences. The natural language model for a sentence structure is stochastically established, and this model can be mathematically consistently connected to a stochastic model between the motions and words. The humanoid robot can understand an observation of human motion in a sentence, and generate human-like motion from a sentence command.
Theme: Motion planning based on a stochastic model
The motion is synthesized based on a stochastic model into which training motions are encoded. This research presents a novel algorithm to find an optimal motion that kinematically satisfies the target motion and that is the most likely to be generated from the stochastic model.
Theme: Motion control based on a stochastic model
The motion generated from a motion symbol should be physical consistent such that a robot can realize the motion in a real world. This research aims at computing a pair of joint angles and joint torques that is likely to be generated by the stochastic model and that satisfies the dynamics (motion equation) of the robot.
Theme: Probabilistic impedance control
A humanoid robot trains the joint angles, reaction forces on its hands, and visual perception during manipulation. The robot watches an object, and subsequently synthesizes the whole body motion during maintaining the training relation between joint angles and reaction forces.
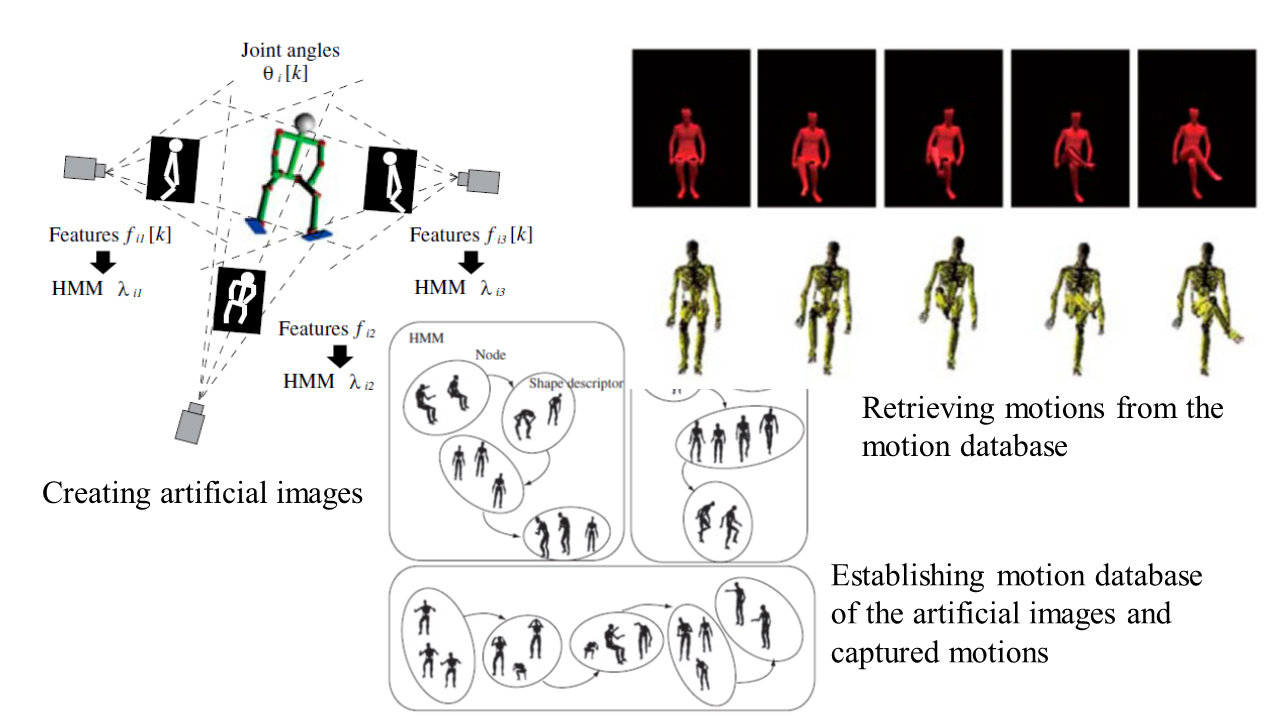
Theme: Markerless motion capturing
The large database of caputured human motions is reused to measure the human activities from a monocular camera. The core technique is creating artificial images containing the performer from the the captured motions, and subsequently mapping between the images and the motion data. Our approach can retrieves the captured motion corresponding to the artificial images similar to the measurement.
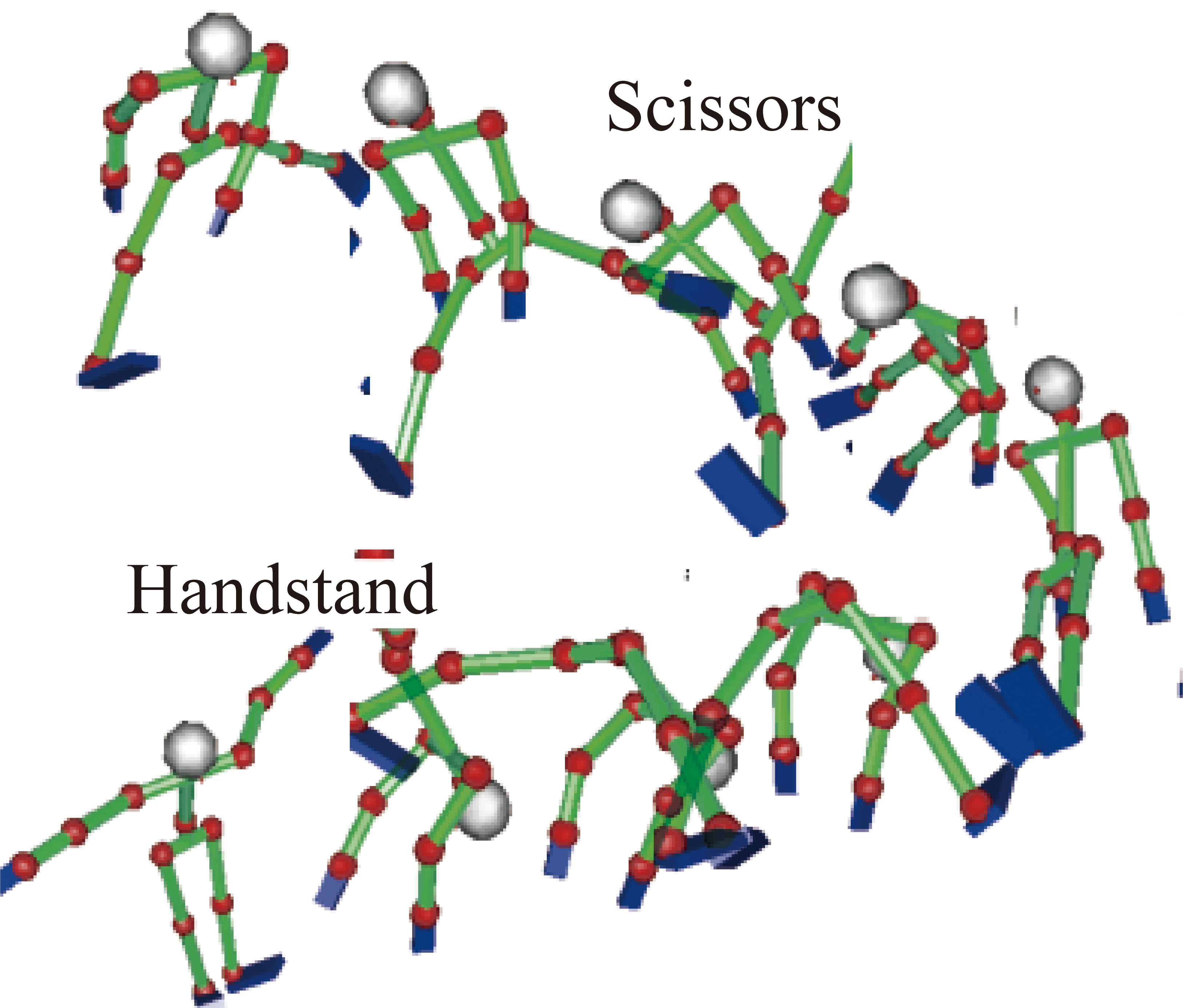
Theme: Automatic scoring system on gymnastics
Scoring gymnastic requires several techniques; motion measurement, segmentation, classification and identification of their combination. Primitive movements are combined to the performance to be scored. Our algorithm segments the measurement into the basic movements, classifies them into their relevant stochastic models. It further finds the performances along the sequence of the basic movements according to the code of the movements and their combinations for the performance. The score can be consequently computed.
Theme: Automatic generation of descriptions from movies in a care facility
A technology to monitor human behaviors has been integrated into care facilities. There have been recorded a lot of movies containing behaviors of aged individuals and careworks. How should be these movies analized and applied to services? This research aims to detecting a person in camera images, classifying his/her actions, and making sentences to describe them. It would be a foundamental technique for automatic care diary generation systems or emergency call systems.

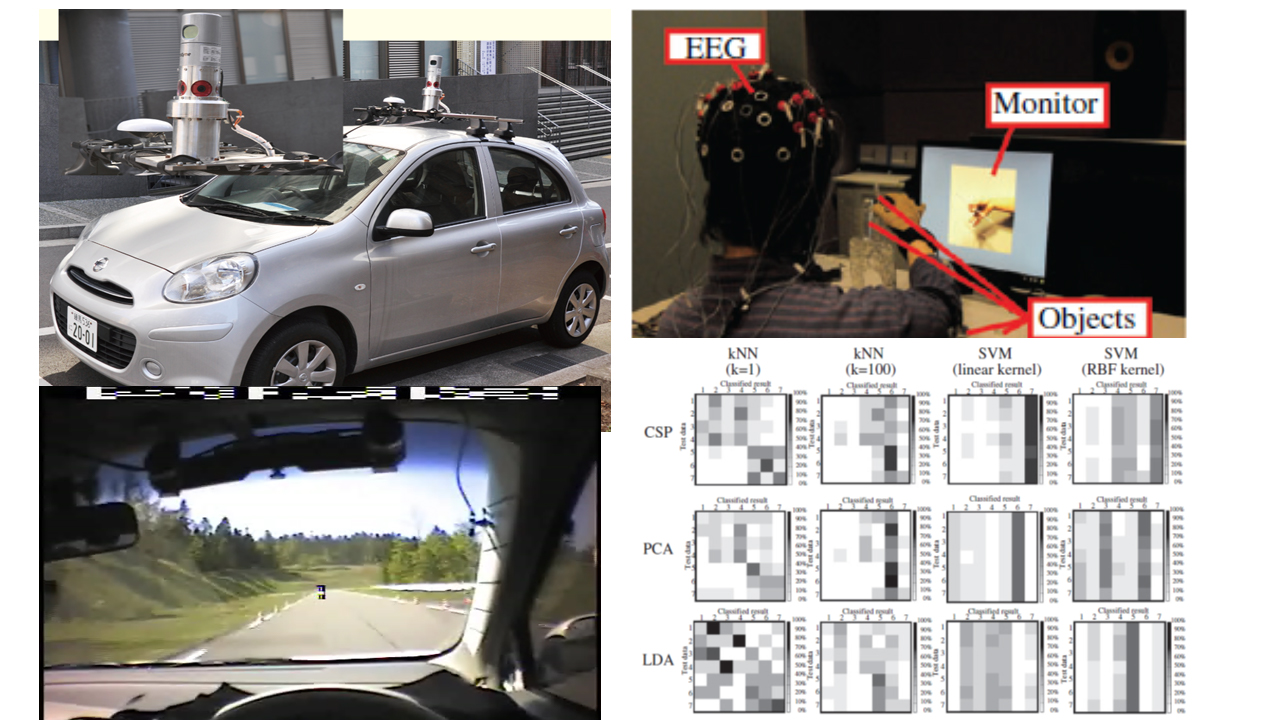
Theme: Applications of the stochastic modeling
The stochastic modeling spatio-temporal data is applied to other engineering fields. We have been making research on stochastic techniques to analize brain activities for Brain Computer Interface(BCI), motions of the elderly for quantative evaluation of the frailty, multimodal data during driving for the supporting system.